

|
| MOQ: | 1 |
| ราคา: | US $3500.00 - 4880.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องกระดาษแข็ง/ลังไม้ |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 500 ชุดต่อปี |
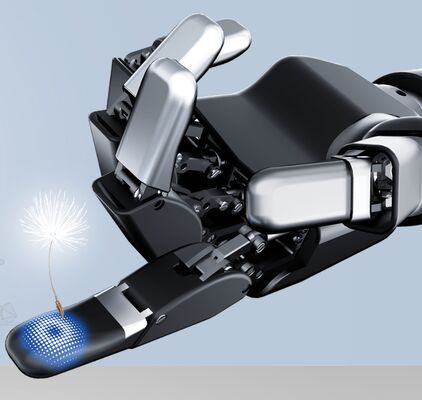
DH-Robotics DH-5-6 เป็นมือหุ่นยนต์มือเก่ง 5 นิ้วที่มี 6 DOF ที่ทํางานมันใช้การขับเคลื่อนที่ขับเคลื่อนด้วยเส้นตรงเล็ก ๆ และรวมพลังงาน / การรับรู้การสัมผัสสําหรับการจับมือนี้มีเป้าหมายสําหรับการใช้งานหุ่นยนต์แบบมนุษย์หุ่นยนต์, ผู้ผลิตหุ่นยนต์ร่วมมือ, แพลตฟอร์มการวิจัยและการศึกษาที่ต้องการความเก่งที่ประหยัด
| ปริมาตร | รายละเอียด |
|---|---|
| นับนิ้ว | 5 นิ้ว |
| DOF ที่ทํางาน | 6 |
| รวมข้อ | 12 |
| การขับเคลื่อน | เครื่องเคลื่อนไหวแบบกระดูก (ไมโครไลเนียร์) |
| การตรวจจับ | แรง / การตอบสนองทางการสัมผัส |
| การควบคุม | การควบคุมแรงตําแหน่งแบบไฮบริด |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ประมาณ 400-550 กรัม |
| แรงนิ้วเดียว | 515 N (ปกติ) |
|
|
| MOQ: | 1 |
| ราคา: | US $3500.00 - 4880.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องกระดาษแข็ง/ลังไม้ |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 500 ชุดต่อปี |
DH-Robotics DH-5-6 เป็นมือหุ่นยนต์มือเก่ง 5 นิ้วที่มี 6 DOF ที่ทํางานมันใช้การขับเคลื่อนที่ขับเคลื่อนด้วยเส้นตรงเล็ก ๆ และรวมพลังงาน / การรับรู้การสัมผัสสําหรับการจับมือนี้มีเป้าหมายสําหรับการใช้งานหุ่นยนต์แบบมนุษย์หุ่นยนต์, ผู้ผลิตหุ่นยนต์ร่วมมือ, แพลตฟอร์มการวิจัยและการศึกษาที่ต้องการความเก่งที่ประหยัด
| ปริมาตร | รายละเอียด |
|---|---|
| นับนิ้ว | 5 นิ้ว |
| DOF ที่ทํางาน | 6 |
| รวมข้อ | 12 |
| การขับเคลื่อน | เครื่องเคลื่อนไหวแบบกระดูก (ไมโครไลเนียร์) |
| การตรวจจับ | แรง / การตอบสนองทางการสัมผัส |
| การควบคุม | การควบคุมแรงตําแหน่งแบบไฮบริด |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ประมาณ 400-550 กรัม |
| แรงนิ้วเดียว | 515 N (ปกติ) |

