|
|
| MOQ: | 1 |
| ราคา: | US $3500.00 - 4900.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องกระดาษแข็ง/ลังไม้ |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 500 ชุดต่อปี |
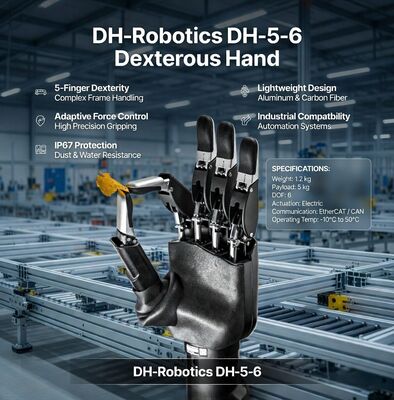
DH-Robotics DH-5-6 เป็นมือหุ่นยนต์แบบ 5 นิ้วที่ขับเคลื่อนด้วยสายเคเบิล มีความคล่องแคล่วสูงถึง 6 องศาอิสระในการเคลื่อนไหว ออกแบบมาสำหรับหุ่นยนต์ฮิวแมนนอยด์ หุ่นยนต์ร่วมปฏิบัติงาน และแพลตฟอร์มการวิจัยที่ต้องการการจับที่เหมือนมนุษย์ การควบคุมแรง และการรับรู้ มือนี้ใช้ตัวกระตุ้นเชิงเส้นขนาดเล็กแบบบูรณาการ และรองรับการควบคุมตำแหน่ง-แรงแบบไฮบริดสำหรับการจัดการที่แม่นยำและยืดหยุ่น
| พารามิเตอร์ | ข้อมูลจำเพาะ |
|---|---|
| นิ้ว | 5 นิ้ว (เหมือนมนุษย์) |
| องศาอิสระในการเคลื่อนไหว | 6 |
| ข้อต่อทั้งหมด | 12 |
| ระบบขับเคลื่อน | ขับเคลื่อนด้วยสายเคเบิลพร้อมตัวกระตุ้นเชิงเส้นขนาดเล็ก |
| การตรวจจับ | เซ็นเซอร์แรง / สัมผัส |
| โหมดควบคุม | การควบคุมแบบไฮบริด ตำแหน่ง + แรง |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ำหนัก | ประมาณ 400–550 กรัม |
| แรงจับของนิ้ว | 5–15 N ต่อ นิ้ว (ทั่วไป) |
โปรดระบุ:
|
|
| MOQ: | 1 |
| ราคา: | US $3500.00 - 4900.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องกระดาษแข็ง/ลังไม้ |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 500 ชุดต่อปี |
DH-Robotics DH-5-6 เป็นมือหุ่นยนต์แบบ 5 นิ้วที่ขับเคลื่อนด้วยสายเคเบิล มีความคล่องแคล่วสูงถึง 6 องศาอิสระในการเคลื่อนไหว ออกแบบมาสำหรับหุ่นยนต์ฮิวแมนนอยด์ หุ่นยนต์ร่วมปฏิบัติงาน และแพลตฟอร์มการวิจัยที่ต้องการการจับที่เหมือนมนุษย์ การควบคุมแรง และการรับรู้ มือนี้ใช้ตัวกระตุ้นเชิงเส้นขนาดเล็กแบบบูรณาการ และรองรับการควบคุมตำแหน่ง-แรงแบบไฮบริดสำหรับการจัดการที่แม่นยำและยืดหยุ่น
| พารามิเตอร์ | ข้อมูลจำเพาะ |
|---|---|
| นิ้ว | 5 นิ้ว (เหมือนมนุษย์) |
| องศาอิสระในการเคลื่อนไหว | 6 |
| ข้อต่อทั้งหมด | 12 |
| ระบบขับเคลื่อน | ขับเคลื่อนด้วยสายเคเบิลพร้อมตัวกระตุ้นเชิงเส้นขนาดเล็ก |
| การตรวจจับ | เซ็นเซอร์แรง / สัมผัส |
| โหมดควบคุม | การควบคุมแบบไฮบริด ตำแหน่ง + แรง |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ำหนัก | ประมาณ 400–550 กรัม |
| แรงจับของนิ้ว | 5–15 N ต่อ นิ้ว (ทั่วไป) |
โปรดระบุ: