|
|
| MOQ: | 1 |
| ราคา: | US $2500.00 - 3000.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องพลาสติก+โฟม |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 1800 ชุดต่อปี |
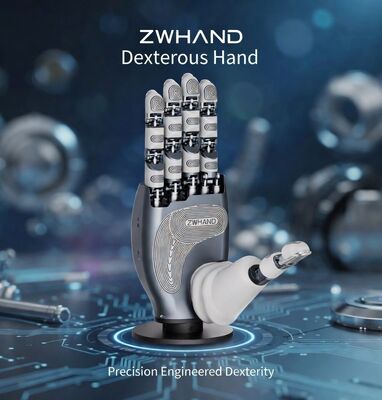
ZWHAND เป็นมือหุ่นยนต์มือเก่งที่ขับเคลื่อนด้วยเส้นเลือดขอด 5 นิ้ว เป็นทางออกที่คุ้มค่าของจีน สําหรับมือหุ่นยนต์แบบมนุษย์ห้องปฏิบัติการวิจัยและแพลตฟอร์มการศึกษามือใช้ตัวขับเคลื่อนเส้นเล็ก ๆ และการขับเคลื่อนเส้นใยเพื่อบรรลุการจับคล้ายมนุษย์ด้วยการควบคุมแรง / ตําแหน่งที่บูรณาการ
| ปริมาตร | รายละเอียด |
|---|---|
| นิ้วมือ | 5 นิ้ว (การวางแผนแบบมนุษย์) |
| ความ เสรีภาพ ใน ระดับ ที่ มี ความ กระตุ้น | 6?? 8 (ขึ้นอยู่กับรุ่น) |
| รวมข้อ | 12 ₹15 (ทั่วไป) |
| ระบบขับเคลื่อน | เครื่องขับกระดูกด้วยเครื่องขับเคลื่อนเส้นตรงขนาดเล็ก |
| การตรวจจับ | เครื่องตรวจจับแรง / การสัมผัส |
| ระบบควบคุม | ตําแหน่ง + การควบคุมแรงไฮบริด |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ประมาณ 400~600 กรัม |
| แรงจับนิ้ว | 515 N ต่อนิ้ว (ช่วงปกติ) |
กรุณาระบุ:
|
|
| MOQ: | 1 |
| ราคา: | US $2500.00 - 3000.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องพลาสติก+โฟม |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 1800 ชุดต่อปี |
ZWHAND เป็นมือหุ่นยนต์มือเก่งที่ขับเคลื่อนด้วยเส้นเลือดขอด 5 นิ้ว เป็นทางออกที่คุ้มค่าของจีน สําหรับมือหุ่นยนต์แบบมนุษย์ห้องปฏิบัติการวิจัยและแพลตฟอร์มการศึกษามือใช้ตัวขับเคลื่อนเส้นเล็ก ๆ และการขับเคลื่อนเส้นใยเพื่อบรรลุการจับคล้ายมนุษย์ด้วยการควบคุมแรง / ตําแหน่งที่บูรณาการ
| ปริมาตร | รายละเอียด |
|---|---|
| นิ้วมือ | 5 นิ้ว (การวางแผนแบบมนุษย์) |
| ความ เสรีภาพ ใน ระดับ ที่ มี ความ กระตุ้น | 6?? 8 (ขึ้นอยู่กับรุ่น) |
| รวมข้อ | 12 ₹15 (ทั่วไป) |
| ระบบขับเคลื่อน | เครื่องขับกระดูกด้วยเครื่องขับเคลื่อนเส้นตรงขนาดเล็ก |
| การตรวจจับ | เครื่องตรวจจับแรง / การสัมผัส |
| ระบบควบคุม | ตําแหน่ง + การควบคุมแรงไฮบริด |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ประมาณ 400~600 กรัม |
| แรงจับนิ้ว | 515 N ต่อนิ้ว (ช่วงปกติ) |
กรุณาระบุ: