|
|
| MOQ: | 1 |
| ราคา: | US $2500.00 - 3000.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องพลาสติก+โฟม |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 1800 ชุดต่อปี |
ภาพรวมสินค้า
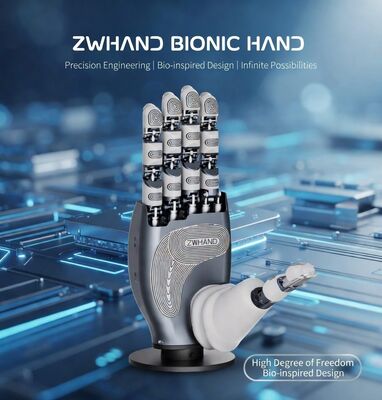
ZWHAND dexterous hand เป็นมือหุ่นยนต์ที่ขับเคลื่อนด้วยเส้นใย 5 นิ้วที่พัฒนาโดย Zhaochi (兆威机电) โดยมี DOF ลงตัว 6?? 8 ตัว, การตรวจจับแรงที่บูรณาการและการควบคุมแบบไฮบริด, เป้าหมายมือหุ่นยนต์ตัวมนุษย์ห้องปฏิบัติการวิจัยและแพลตฟอร์มการศึกษาผลิตภัณฑ์นี้เน้นการหลอกลวงที่มีประสิทธิภาพต่อค่าใช้จ่าย โดยมีข้อดีต่อโซ่จําหน่ายในประเทศ
รายละเอียดเทคนิค
| ปริมาตร | รายละเอียด |
|---|---|
| นิ้วมือ | 5 นิ้ว (แบบมนุษย์) |
| DOF ที่ทํางาน | 6?? 8 |
| รวมข้อ | 12 ราคา 15 |
| วิธีการขับ | เครื่องขับกระดูกด้วยเครื่องขับเคลื่อนเส้นตรงขนาดเล็ก |
| การตรวจจับ | การตอบสนองด้วยแรง/การสัมผัส |
| ระบบควบคุม | ตําแหน่งไฮบริด + แรง |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ~ 400 ละ 600 กรัม |
| แรงจับนิ้ว | 515 N (ปกติ) |
อุตสาหกรรมการใช้งาน
ปัญหา และ วิธี แก้ไข
รูปแบบสํารอง
ทําไม ควร ซื้อ จาก เรา
สต็อคและเวลาการจัดส่ง
แบบ RFQโปรดส่งมาให้เรา:
|
|
| MOQ: | 1 |
| ราคา: | US $2500.00 - 3000.00/ Set |
| การบรรจุแบบมาตรฐาน: | กล่องพลาสติก+โฟม |
| ระยะเวลาการจัดส่ง: | 6~8 สัปดาห์ |
| วิธีการชำระเงิน: | ที/ที |
| ความสามารถในการจัดหา: | 1800 ชุดต่อปี |
ภาพรวมสินค้า
ZWHAND dexterous hand เป็นมือหุ่นยนต์ที่ขับเคลื่อนด้วยเส้นใย 5 นิ้วที่พัฒนาโดย Zhaochi (兆威机电) โดยมี DOF ลงตัว 6?? 8 ตัว, การตรวจจับแรงที่บูรณาการและการควบคุมแบบไฮบริด, เป้าหมายมือหุ่นยนต์ตัวมนุษย์ห้องปฏิบัติการวิจัยและแพลตฟอร์มการศึกษาผลิตภัณฑ์นี้เน้นการหลอกลวงที่มีประสิทธิภาพต่อค่าใช้จ่าย โดยมีข้อดีต่อโซ่จําหน่ายในประเทศ
รายละเอียดเทคนิค
| ปริมาตร | รายละเอียด |
|---|---|
| นิ้วมือ | 5 นิ้ว (แบบมนุษย์) |
| DOF ที่ทํางาน | 6?? 8 |
| รวมข้อ | 12 ราคา 15 |
| วิธีการขับ | เครื่องขับกระดูกด้วยเครื่องขับเคลื่อนเส้นตรงขนาดเล็ก |
| การตรวจจับ | การตอบสนองด้วยแรง/การสัมผัส |
| ระบบควบคุม | ตําแหน่งไฮบริด + แรง |
| การสื่อสาร | CAN / RS485 / EtherCAT |
| น้ําหนัก | ~ 400 ละ 600 กรัม |
| แรงจับนิ้ว | 515 N (ปกติ) |
อุตสาหกรรมการใช้งาน
ปัญหา และ วิธี แก้ไข
รูปแบบสํารอง
ทําไม ควร ซื้อ จาก เรา
สต็อคและเวลาการจัดส่ง
แบบ RFQโปรดส่งมาให้เรา: