|
|
| MOQ: | 1 |
| ราคา: | 1500$ |
| การบรรจุแบบมาตรฐาน: | 169 ซม. (ส), 75 ซม. (ก) ,30 ซม. (ล) |
| ระยะเวลาการจัดส่ง: | 1 เดือน |
| ความสามารถในการจัดหา: | 99ยูนิต |
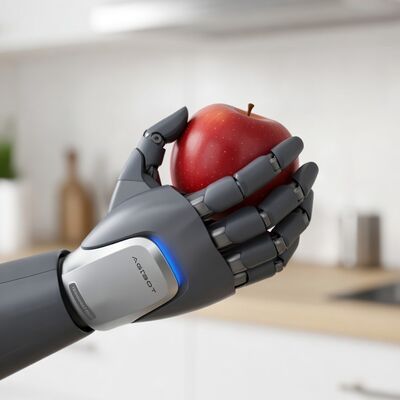
New AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand เป็นอุปกรณ์ปลายทางหุ่นยนต์ขั้นสูงที่ออกแบบมาเพื่อเลียนแบบการเคลื่อนไหวของมือมนุษย์ด้วยความแม่นยำและความยืดหยุ่น มือหุ่นยนต์ห้านิ้วนี้รองรับการเคลื่อนไหวของนิ้วที่ประสานกัน การจับที่แม่นยำสูง และการตอบสนองต่อแรงป้อนกลับอัจฉริยะสำหรับงานจัดการที่ซับซ้อน
OmniHand Pro 2025 เหมาะสำหรับหุ่นยนต์ฮิวแมนนอยด์ หุ่นยนต์บริการ แพลตฟอร์มการวิจัย และแขนหุ่นยนต์อุตสาหกรรมที่ต้องการการเคลื่อนไหวของมือที่เป็นธรรมชาติ การจัดการวัตถุแบบปรับได้ และการโต้ตอบระหว่างมนุษย์กับหุ่นยนต์ที่ปลอดภัย
แต่ละนิ้วสามารถเคลื่อนที่ได้อย่างอิสระเพื่อทำการจับและการจัดการที่เป็นธรรมชาติคล้ายกับการเคลื่อนไหวของมือมนุษย์
เซ็นเซอร์แรงและสัมผัสในตัวช่วยให้ควบคุมการจับแบบปรับได้ตามรูปร่าง น้ำหนัก และความเปราะบางของวัตถุ
การควบคุมข้อต่อหลายข้ออย่างราบรื่นและแม่นยำรองรับการจัดการที่ละเอียดอ่อนและงานจัดการที่ซับซ้อน
อัลกอริธึมการควบคุมแบบดิจิทัลขั้นสูงช่วยให้การเคลื่อนไหวตอบสนองและการปรับแบบเรียลไทม์เพื่อการทำงานที่เสถียร
รองรับการผสานรวมกับหุ่นยนต์ฮิวแมนนอยด์ แขนหุ่นยนต์ และหุ่นยนต์บริการผ่านอินเทอร์เฟซการสื่อสารและการติดตั้งมาตรฐาน
ตัวเลือกการกำหนดค่าที่ยืดหยุ่นช่วยให้สามารถปรับแต่งสำหรับงานเฉพาะหรือระบบหุ่นยนต์ได้
| รายการ | ข้อมูลจำเพาะ |
|---|---|
| ประเภทสินค้า | มือหุ่นยนต์ฮิวแมนนอยด์ห้านิ้ว |
| องศาอิสระ | นิ้วอิสระหลายข้อต่อ |
| วิธีการควบคุม | การควบคุมแบบดิจิทัลอัจฉริยะ |
| การรับรู้ | การตอบสนองต่อแรงและสัมผัส |
| ความเข้ากันได้ | หุ่นยนต์ฮิวแมนนอยด์และแขนหุ่นยนต์ |
| การสื่อสาร | อินเทอร์เฟซหุ่นยนต์มาตรฐาน |
| การรวม | การติดตั้งและการควบคุมแบบแยกส่วน |
| แหล่งจ่ายไฟ | ระบบภายนอกที่ขับเคลื่อน |
| สภาพแวดล้อมการทำงาน | พื้นที่ในร่ม อุตสาหกรรม และการวิจัย |
ข้อมูลจำเพาะอาจแตกต่างกันไปขึ้นอยู่กับการกำหนดค่า
AGIBOT OmniHand Pro 2025 ผสมผสานการออกแบบเชิงกลไกของมนุษย์เข้ากับการรับรู้และการควบคุมอัจฉริยะเพื่อรองรับหุ่นยนต์ฮิวแมนนอยด์รุ่นต่อไปและแพลตฟอร์มหุ่นยนต์ขั้นสูง ให้การจัดการที่มีประสิทธิภาพสูงและความยืดหยุ่นที่เพิ่มขึ้นสำหรับการใช้งานในอนาคต
เป็นมือหุ่นยนต์ฮิวแมนนอยด์ห้านิ้วที่ออกแบบมาสำหรับการจัดการขั้นสูงและการเคลื่อนไหวเหมือนมนุษย์ในด้านหุ่นยนต์
ใช่ รองรับการผสานรวมกับหุ่นยนต์ฮิวแมนนอยด์ แขนหุ่นยนต์ และหุ่นยนต์บริการโดยใช้อินเทอร์เฟซมาตรฐาน
สามารถทำการจับ การจัดการ การจัดการวัตถุ และงานที่ละเอียดอ่อนที่ต้องใช้ความแม่นยำและการควบคุมแบบปรับได้
ใช่ เซ็นเซอร์แรงและสัมผัสในตัวช่วยให้ควบคุมการจับแบบปรับได้ตามการตอบสนองการสัมผัส
ใช่ มีการใช้กันอย่างแพร่หลายในห้องปฏิบัติการวิจัย AI หุ่นยนต์ และสภาพแวดล้อมการสอนสำหรับการศึกษาการจัดการขั้นสูง
ใช่ การออกแบบแบบแยกส่วนช่วยให้สามารถปรับแต่งสำหรับแอปพลิเคชันและความต้องการของระบบต่างๆ ได้
|
|
| MOQ: | 1 |
| ราคา: | 1500$ |
| การบรรจุแบบมาตรฐาน: | 169 ซม. (ส), 75 ซม. (ก) ,30 ซม. (ล) |
| ระยะเวลาการจัดส่ง: | 1 เดือน |
| ความสามารถในการจัดหา: | 99ยูนิต |
New AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand เป็นอุปกรณ์ปลายทางหุ่นยนต์ขั้นสูงที่ออกแบบมาเพื่อเลียนแบบการเคลื่อนไหวของมือมนุษย์ด้วยความแม่นยำและความยืดหยุ่น มือหุ่นยนต์ห้านิ้วนี้รองรับการเคลื่อนไหวของนิ้วที่ประสานกัน การจับที่แม่นยำสูง และการตอบสนองต่อแรงป้อนกลับอัจฉริยะสำหรับงานจัดการที่ซับซ้อน
OmniHand Pro 2025 เหมาะสำหรับหุ่นยนต์ฮิวแมนนอยด์ หุ่นยนต์บริการ แพลตฟอร์มการวิจัย และแขนหุ่นยนต์อุตสาหกรรมที่ต้องการการเคลื่อนไหวของมือที่เป็นธรรมชาติ การจัดการวัตถุแบบปรับได้ และการโต้ตอบระหว่างมนุษย์กับหุ่นยนต์ที่ปลอดภัย
แต่ละนิ้วสามารถเคลื่อนที่ได้อย่างอิสระเพื่อทำการจับและการจัดการที่เป็นธรรมชาติคล้ายกับการเคลื่อนไหวของมือมนุษย์
เซ็นเซอร์แรงและสัมผัสในตัวช่วยให้ควบคุมการจับแบบปรับได้ตามรูปร่าง น้ำหนัก และความเปราะบางของวัตถุ
การควบคุมข้อต่อหลายข้ออย่างราบรื่นและแม่นยำรองรับการจัดการที่ละเอียดอ่อนและงานจัดการที่ซับซ้อน
อัลกอริธึมการควบคุมแบบดิจิทัลขั้นสูงช่วยให้การเคลื่อนไหวตอบสนองและการปรับแบบเรียลไทม์เพื่อการทำงานที่เสถียร
รองรับการผสานรวมกับหุ่นยนต์ฮิวแมนนอยด์ แขนหุ่นยนต์ และหุ่นยนต์บริการผ่านอินเทอร์เฟซการสื่อสารและการติดตั้งมาตรฐาน
ตัวเลือกการกำหนดค่าที่ยืดหยุ่นช่วยให้สามารถปรับแต่งสำหรับงานเฉพาะหรือระบบหุ่นยนต์ได้
| รายการ | ข้อมูลจำเพาะ |
|---|---|
| ประเภทสินค้า | มือหุ่นยนต์ฮิวแมนนอยด์ห้านิ้ว |
| องศาอิสระ | นิ้วอิสระหลายข้อต่อ |
| วิธีการควบคุม | การควบคุมแบบดิจิทัลอัจฉริยะ |
| การรับรู้ | การตอบสนองต่อแรงและสัมผัส |
| ความเข้ากันได้ | หุ่นยนต์ฮิวแมนนอยด์และแขนหุ่นยนต์ |
| การสื่อสาร | อินเทอร์เฟซหุ่นยนต์มาตรฐาน |
| การรวม | การติดตั้งและการควบคุมแบบแยกส่วน |
| แหล่งจ่ายไฟ | ระบบภายนอกที่ขับเคลื่อน |
| สภาพแวดล้อมการทำงาน | พื้นที่ในร่ม อุตสาหกรรม และการวิจัย |
ข้อมูลจำเพาะอาจแตกต่างกันไปขึ้นอยู่กับการกำหนดค่า
AGIBOT OmniHand Pro 2025 ผสมผสานการออกแบบเชิงกลไกของมนุษย์เข้ากับการรับรู้และการควบคุมอัจฉริยะเพื่อรองรับหุ่นยนต์ฮิวแมนนอยด์รุ่นต่อไปและแพลตฟอร์มหุ่นยนต์ขั้นสูง ให้การจัดการที่มีประสิทธิภาพสูงและความยืดหยุ่นที่เพิ่มขึ้นสำหรับการใช้งานในอนาคต
เป็นมือหุ่นยนต์ฮิวแมนนอยด์ห้านิ้วที่ออกแบบมาสำหรับการจัดการขั้นสูงและการเคลื่อนไหวเหมือนมนุษย์ในด้านหุ่นยนต์
ใช่ รองรับการผสานรวมกับหุ่นยนต์ฮิวแมนนอยด์ แขนหุ่นยนต์ และหุ่นยนต์บริการโดยใช้อินเทอร์เฟซมาตรฐาน
สามารถทำการจับ การจัดการ การจัดการวัตถุ และงานที่ละเอียดอ่อนที่ต้องใช้ความแม่นยำและการควบคุมแบบปรับได้
ใช่ เซ็นเซอร์แรงและสัมผัสในตัวช่วยให้ควบคุมการจับแบบปรับได้ตามการตอบสนองการสัมผัส
ใช่ มีการใช้กันอย่างแพร่หลายในห้องปฏิบัติการวิจัย AI หุ่นยนต์ และสภาพแวดล้อมการสอนสำหรับการศึกษาการจัดการขั้นสูง
ใช่ การออกแบบแบบแยกส่วนช่วยให้สามารถปรับแต่งสำหรับแอปพลิเคชันและความต้องการของระบบต่างๆ ได้